| ガウス型関数 | ||||||||||||||||||||||||||||
注:以下はベンチマークテストstep3,T31モデルの入力例である。
ガウス型関数: ガウス型関数を用いる場合、Slip Velocity Func.でGaussian=3を入力。下記の式より、σ=1st Half Rise Time (s)であり、 1st Half Rise Time (s)にて入力した値の 4 倍がモーメント・レートの時刻歴関数におけるピーク時刻に相当するよう設定されている。 (上記例では 0.2(s) × 4 = 0.8(s)) また、2nd Half Rise Time (s)には 0 を入力する モーメント・レートの時刻歴関数 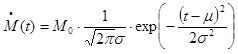 , σ=0.2(s), μ=4σ=0.8(s) …(1-1) , σ=0.2(s), μ=4σ=0.8(s) …(1-1)ここで,tは時刻(s),σ,μは定数.μがピークの時刻に相当する.(1)式は裾野がゼロにならないので,便宜的にピークから-4σを破壊開始時刻とする(図1-3).モーメントの時刻歴関数M(t)は(1)式の積分より、(2)式となる(図1-4). ここで,erf(x)は誤差関数であり,(3)式で表される. erfは初等関数で表せないが,Fortranでは組み込み関数erf( )がある.また近似式もある(数値解析手法(2010)の資料1参照). 一方、 (1)式のフーリエ変換は次式になる(図1-5)。  , …(1-3) , …(1-3)ここで、i は虚数である。 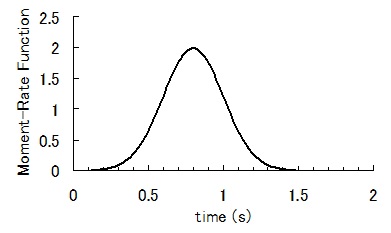 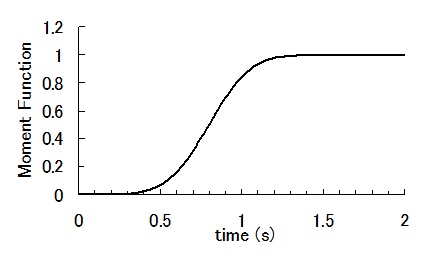 図1-3 モーメント・レートの時刻歴関数(Moで基準化) 図1-4 モーメントの時刻歴関数(Moで基準化) 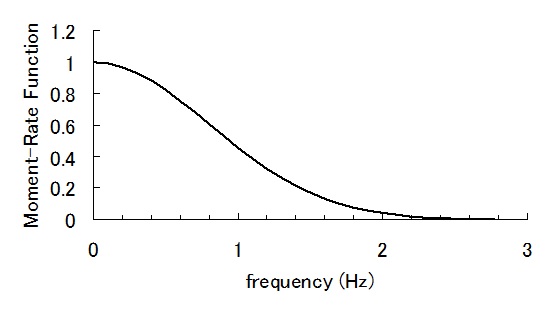 図1-5 モーメント・レート関数のフーリエ変換 |
||||||||||||||||||||||||||||